水翼样机设计
水翼样机设计
大致模板
尺寸(长宽高)173.5 * 81.4 * 95cm

方案初步设计
冲浪板设计
轮廓设计
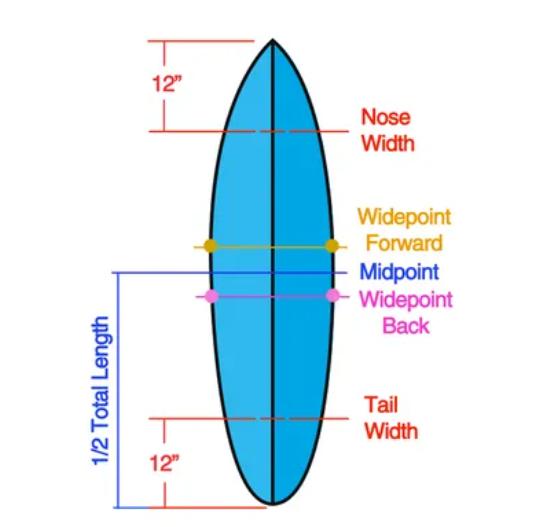
冲浪板的轮廓(outline)或平面形状是冲浪板最明显的特征。任何板的整体平面形状一般由常见的板型参数决定的——长度、板头宽度(nose width)、宽点(wide point)宽度和板尾宽度(tail width)。
长度确定:冲浪板通常分为长板、中板、短板三种尺寸。长板的标准长度是在九英尺(约2.74m)以上,短板的标准长度是在七英尺(2.13m)以下,中板的尺寸介于长板和短板之间,兼具长短板不同的特点和优点。长板提供更好的稳定性,更容易在波浪中保持平衡。此外,长板在小波浪和不太理想的条件下表现更好。短板可以实现更高的速度和更强的操控性,能在大波浪中完成更复杂的动作。
考虑到整个跨介质机器人长约1m,设计的水翼样机长度初步定为0.6m,即60cm。
板头宽度
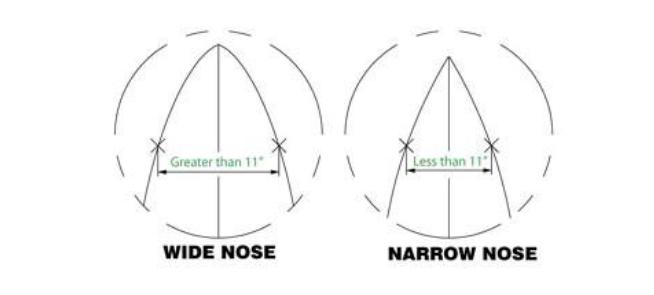
在短板上使用较宽的板头(大于11英寸),有助于弥补板排水量的整体减少,在较平的冲浪板上,较宽的板头有助于产生更多的升力。但一般来说,短板性能板的板头宽度(鼻部宽度)约在11英寸(约28厘米)到12英寸(约30.5厘米)之间。这种设计使得短板在波浪中更具灵活性和敏捷性,以便完成更为复杂的冲浪动作。
考虑到上述情况,设计冲浪板板头宽度初步定为11英寸(约28厘米),在等比例缩小0.5后为14cm。
板尾宽度
较宽的板尾(大于14英寸)设计最常见于适合较小、较软的浪,以及具有4个或更多尾鳍的冲浪板上。更宽的板尾使得移动缓慢的冲浪板可保持在水面上滑行。通常,短板性能板的板尾宽度约在14英寸(约35.5厘米)到15英寸(约38厘米)之间。这种设计有助于提供更好的操控性,使冲浪者能够在波浪中轻松地调整方向和完成高难度的动作。
在这里,如上取中间值,设计冲浪板板尾宽度初步定为14英寸(约35.5厘米),在等比例缩小0.5后为17.78cm。
宽点
性能短板的宽点经常出现在板长的中点后面,而在许多复古板、长板和枪板的宽点则在中点之前。将宽点向后移会缩短冲浪板的转弯半径,但会影响驱动力。而宽点前移会使转弯半径更大,但保持了更多的驱动力。将宽点置于板长的中点通常被认为是“中性的”。这种设计在驱动力和响应能力之间取得折衷。
较宽的板(19英寸或更宽)比较窄的板具有更多的排水量和板底面积,在所有其他条件相同的情况下,这增加了浮力和划水的便利性。更宽的板也更稳定,更宽的板尾也是如此。通常情况下,短板性能板的宽点宽度约在18英寸(约45.7厘米)到20英寸(约50.8厘米)之间。这种设计有助于在保持操控性的同时,为冲浪者提供一定的浮力和稳定性。
在这里,如上取中间值,设计冲浪板的宽点置于板长的中点,宽点宽度初步定为19英寸(约48.3厘米),在等比例缩小0.5后为24.13cm。
板面曲面
冲浪板的板缘到板缘之间的横剖面也是“翼型的/foiled”,通常在龙骨处最厚,然后向外朝着板缘平滑地逐渐变薄。这种翼型形状不仅决定了板的厚度,也有助于确定板缘的厚度和排水量。因为板面可能是平的(flat)、圆顶的(domed)、凹型的(concave)或介于两者之间的任何形状。一般来说,板面越平,板面侧的排水量越往板缘分布,板的总排水量就越大,这种设计旨在提高稳定性和驱动力。
薄的板(最厚处为2.375英寸即6.0325cm或更薄)更容易变形,更难划水,同时驱动力也更小,但反应更快;这类板非常适合较好的浪和块头小或较高阶以及划水有力的冲浪者。厚的板(最厚处2.5英寸即6.35cm或更厚)不太可能折断,但在弹性变形方面显得刚硬,同时由于浮力增加使得划水更容易,且更有驱动力。
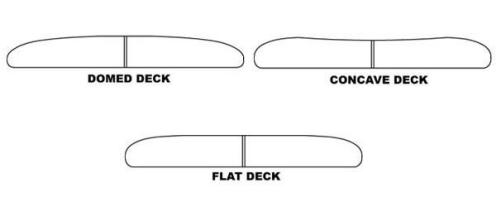
在这里,考虑到稳定性和驱动力以及控制区域的设计要求(电池高约4cm),设计初步选择平的曲面,厚度为8cm。
冲浪板翘度
典型的现代性能短板在板头尖处有大约5英寸的板头翘度,在板尾尖处有大约2又1/4英寸的板尾翘度。所以对于大多数冲浪者来说,每种板的性能参数几乎都是预先确定的。大翘度(heavy rocker)或说非常弯曲的板会产生相对较大的升力和阻力,小翘度的板产生的升力小,但阻力也小。

以下是一个简单的表格,显示了几种不同类型常见长度的冲浪板的典型(板头和板尾)翘度规格:
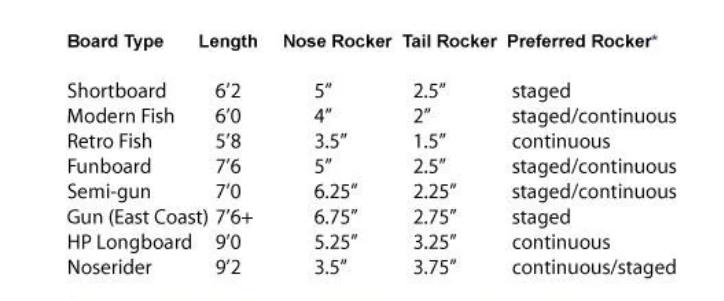
在这里,根据短板的典型值,设计的翘度为5英寸(约12.7cm)和2.5英寸(约6.35cm)。
板尾形状
目前为止最为流行的板尾是圆方尾,它提供了很多人理想中的升力和释放之间的平衡 ——其形状使得转向剧烈但流畅。
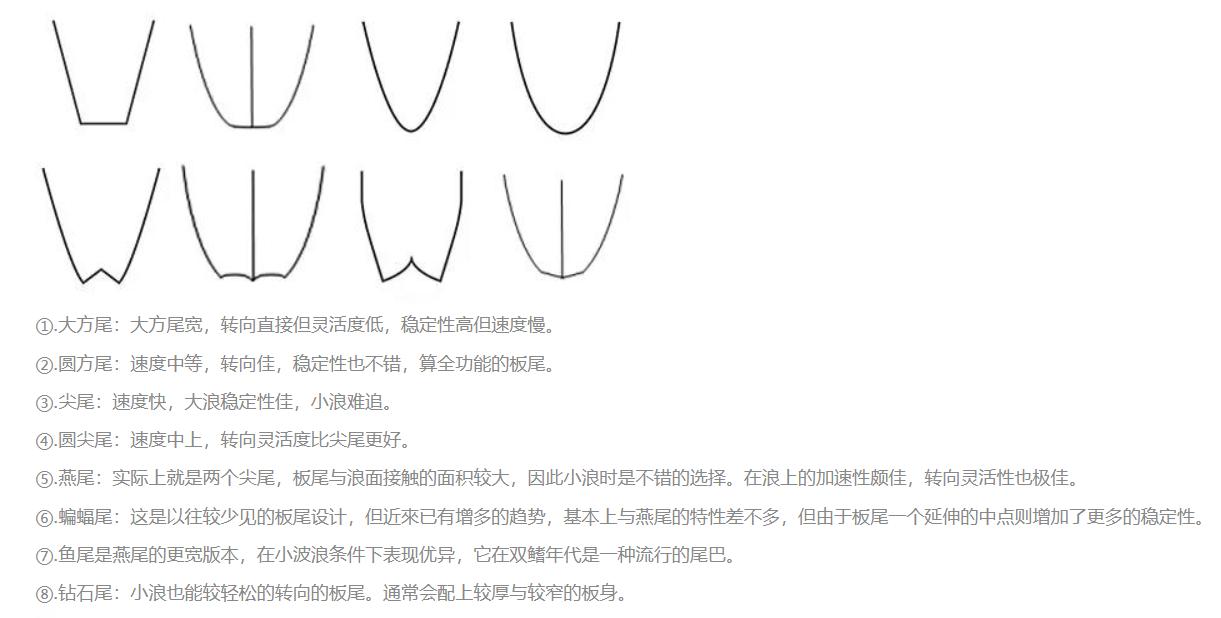
综合,考虑板尾设计为圆方尾。
板底设计
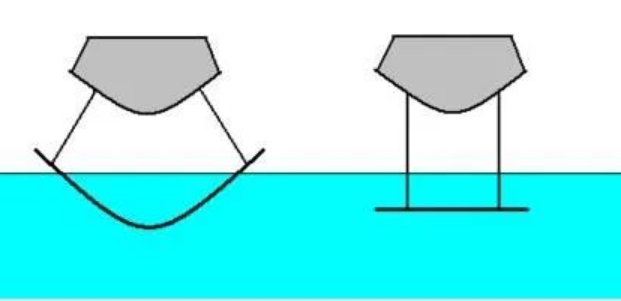
在理论上将所有板底(曲面)设计按特征分为三类:平面/平的(flat)、凹面/凹的(concave,俗称水槽)和凸面/凸的(convex)。平底以非常可预测和平衡的方式发挥作用,特别是在中等速度和中等尺寸的浪中。许多削板师都同意,在一定条件下平底冲浪板是所有板底设计中效率最高、速度最快的。
综合,考虑板底设计为平底。
水翼设计
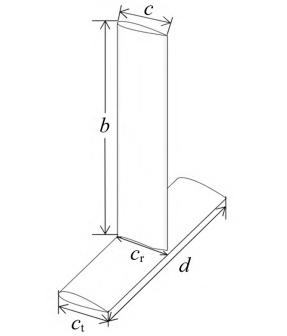
基于前几周科大的师兄的水翼设计文档以及文献T 型水翼结构及轻量化设计,初步确定了水翼的基本参数。其中:b 为立柱高度,c 为立柱弦长,d 为水平主翼翼展,cr为翼根弦弦长,ct为翼尖弦弦长。
翼型确定
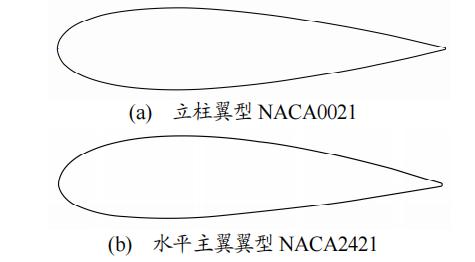
基于对于水翼样机运行高速稳定等条件需要,NACA 系列翼型相对成熟且调用方便。因此,本文选择 NACA4 位翼型。
NACA0021 翼型为对称翼型,可以承受较大压力,故选用此翼型为立柱翼型。
NACA2421 翼型具有良好的升阻比性能及较大的失速攻角,可以产生较大升力,故选用此翼型为水平主翼翼型。
立柱翼型参数确定
根据设计要求以及参考水翼冲浪板的设计,立柱高度为15cm。
立柱翼型的展弦比
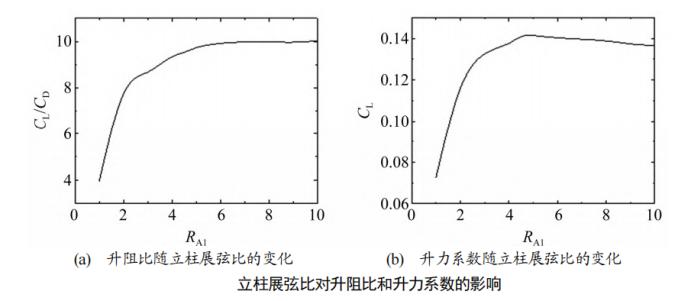
由图 可知:水平主翼保持不变,立柱展弦比由1 到 10 时,T 型水翼升阻比和升力系数先增加后趋于稳定。因此,当立柱展弦比取 6 时,T 型水翼具有较大的升阻比和较好的水动力性能。
根据设计要求,立柱高度为 15cm,因此确定立柱弦长为2.5 cm,厚度为5.25mm。
前水翼翼型参数确定
基于科大师兄们的前期工作,确定水翼的基本参数。水翼机翼展弦比为5,水平主翼尖削比为 0.2,水翼攻角为 6°时具有较好的水动力效果。翼展和弦长如下(其中:l为翼展,b为平均弦长 ):
| l(m) | 5m/s | 10 | 15 | 20 |
|---|---|---|---|---|
| 1 | 0.0965 | 0.0607 | 0.0462 | 0.0381 |
| 1.5kg | 0.1182 | 0.0743 | 0.0566 | 0.0467 |
| 2 | 0.1365 | 0.0858 | 0.0654 | 0.0539 |
| 5 | 0.2158 | 0.1356 | 0.1034 | 0.0852 |
| b(m) | 5m/s | 10 | 15 | 20 |
|---|---|---|---|---|
| 1 | 0.0193 | 0.0121 | 0.0092 | 0.0076 |
| 1.5kg | 0.0236 | 0.0149 | 0.0113 | 0.0093 |
| 2 | 0.0273 | 0.0172 | 0.0131 | 0.0108 |
| 5 | 0.0432 | 0.0271 | 0.0207 | 0.0170 |
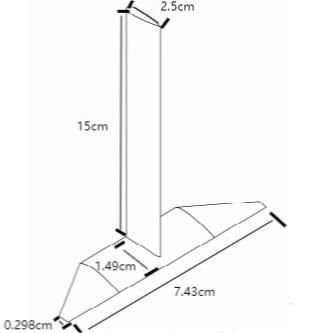
以整体跨介质机器人为考虑对象,重约1.5kg,最大滑行速度≥5.56m/s,最大潜行速度≥2.78m/s,根据上表选择1.5kg,10m/s速度下的参数。
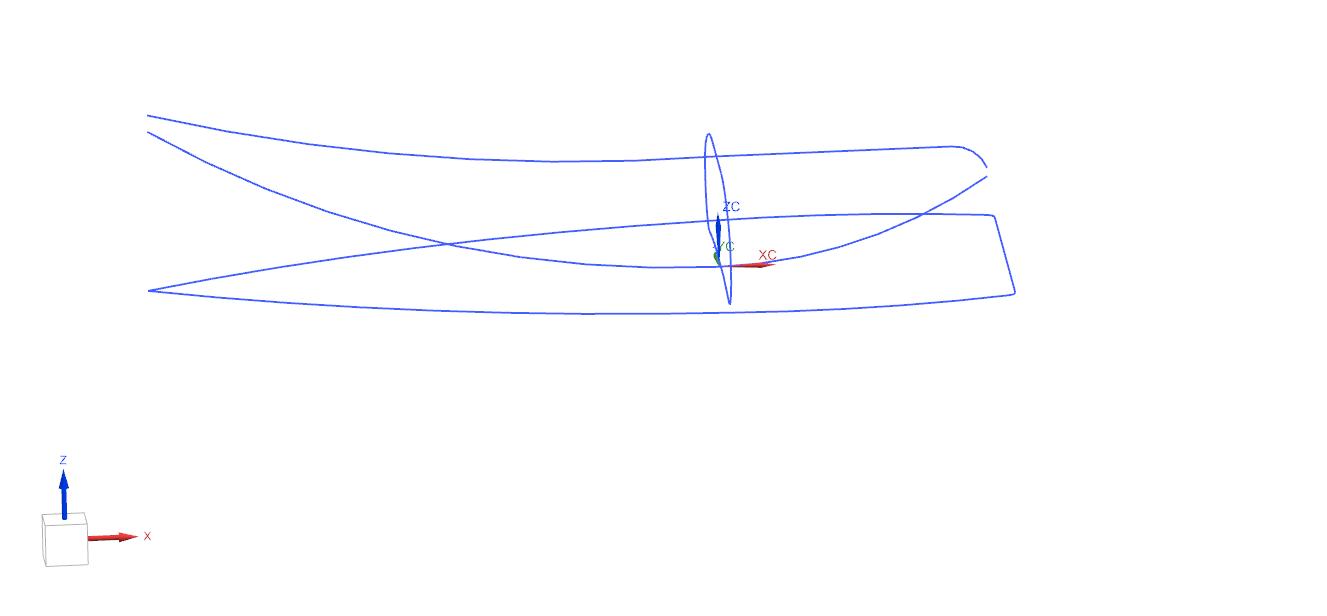
即翼展(l)为7.43cm,平均弦长(b)为1.49cm,厚度为0.32cm,具体如下图
前水翼控制
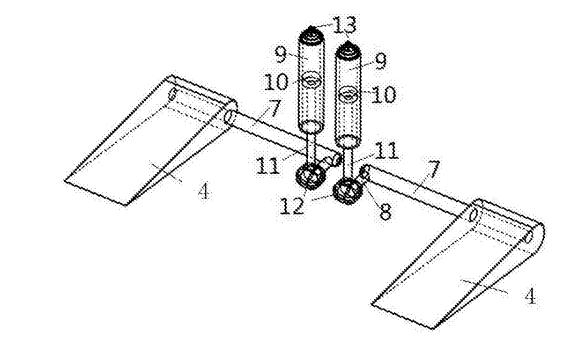
上图为控制两个水翼pitch运动的连杆机构,通过参考这个进行设计。
水翼的yaw运动,暂时还未有较好的想法。
尾翼翼型参数确定
尾翼基于前翼的2/3设计。即翼展(l)为4.96cm,平均弦长(b)为0.83cm 。
连接件长度确定
设计一个类圆锥形的连接前水翼和尾翼的连接件,长度为18cm,半径和电机配套。
电路设计
模块整定
| 模块 | 数目 | 重量 | 规格(长宽高mm) |
|---|---|---|---|
| 雷迅V5+ | 1 | 91g | 85.5 * 42 * 33 |
| 雷迅自带电源管理模块 | 1 | 20g | —————— |
| 格氏4s120c2000mah电池 | 1 | 215g | 77 * 38.5 * 41 |
| 四合一60A电调 | 1 | 14.5g | —————— |
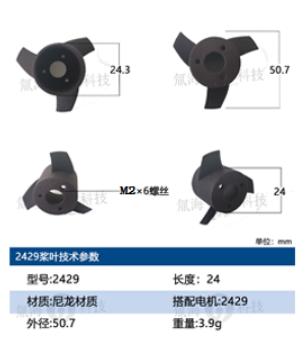
| 2429防水电机 | 1 | 55g | —————— |
| 2429配套桨叶 | 1 | 3.9g | —————— |
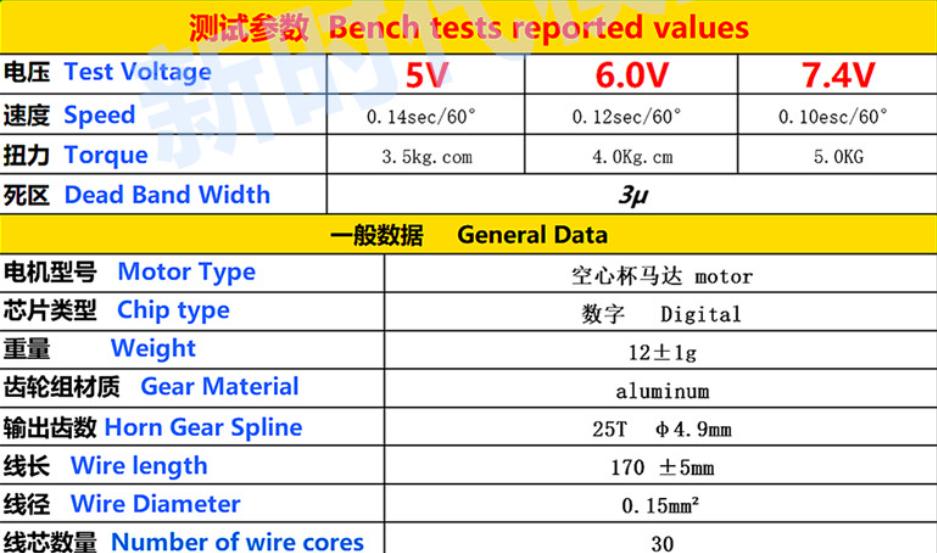
| 5kg微型舵机 | 2 | 12g * 2 | —————— |
| M10深度传感器 | 1 | 17.2g | —————— |
| 总重 | —— | 440.6g | —————— |
| 具体水翼部分总重 | —— | 100.1g | —————— |
具体水翼部分

30bar即300m,0.2mbar即2mm。

耐压密封部分
根据情况,设计玻璃耐压仓。
草图:
 wechat
wechat- alipay