
PX4IMU等数据处理
PX4IMU等数据处理1.前置条件 -已搭建PX4开发环境(基于Ubuntu/NuttX) -熟悉uORB消息系统架构 -使用C++开发模块
2.uORB消息类型2.1IMU数据-主消息:sensor_combined(包含加速度计+陀螺仪原始数据)-独立消息:-sensor_accel(三轴加速度计原始数据)-sensor_gyro(三轴陀螺仪原始数据)
-vehicle_attitude EKF2 的 vehicle_attitude 数据,四元数
2.2GPS数据-主消息:vehicle_gps_position -包含字段:-经纬度(lat/lon)-海拔高度(alt)-定位状态(fix_type)-卫星数(satellites_used)
2.3消息-src/lib/drivers/accelerometer/PX4Accelerometer.cpp
-这段代码是 PX4 固件中 PX4Accelerometer 类的实现,负责处理加速度计的数据,包括数据的旋转、缩放、发布以及 F ...
机载通信
机载通信1.通过主控发送IMU等数据,到RDK X5的接受。结果:
2.双边通信:
机载电脑发送RDK5

RDKX5
RDKX5一、使用串口RDK X5 在 40PIN 上默认使能 UART1,物理管脚号 8 和 10,IO电压 3.3V。
接入 USB串口转接板开发板USB Type A接口(接口7),支持USB串口转接板功能,可自动检测USB串口转接板接入并创建设备节点/dev/ttyUSB*或者/dev/ttyACM*(星号代表0开始的数字)。
二、测试过程运行 python3 /app/40pin_samples/test_serial.py从打印的串口设备(其中 /dev/ttyS0 是系统调试口,不建议对它进行测试,除非你完全明白它的作用)中选择总线号和片选号作为输入选项,例如 RDK X3 选择测试 /dev/ttyS3,RDK X5 选择测试 /dev/ttyS1,RDK Ultra 选择测试 /dev/ttyS2 按回车键确认,并输入波特率参数:
List of enabled UART:/dev/ttyS0 /dev/ttyS1 /dev/ttyS3 /dev/tt ...
PX4串口通信
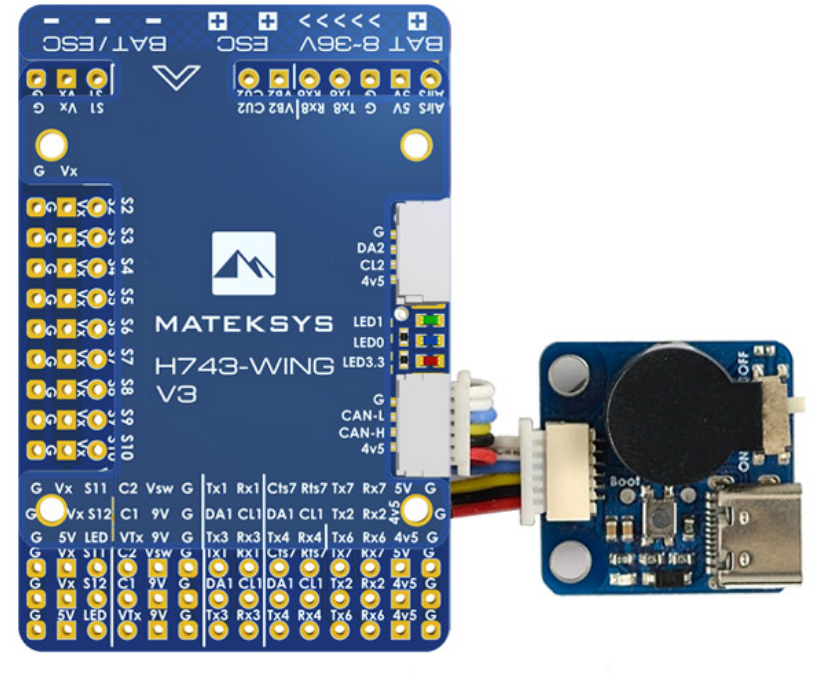
PX4串口通信一、硬件准备1.飞控型号:支持PX41.14.1的硬件(Matek H73-wing)。2.串口接口: 选择飞控的UART端口(PX4有TELEM1、TELEM2、GPS1等),根据硬件手册及代码确认引脚定义。3.连接设备: 电脑(串口调试助手)。
4.连接方式: 串口转USB。
二、PX4串口设置
1.PX4串口
在H7系列主控中,串口通常启用1,2,3,4,6,7,8。由于移植PX4固件,后续配置中关闭串口1 ,所以存在2,3,4,6,7,8。分别对应:
UART(STM32H7)
Device(NuttX)
USART2
/dev/ttyS0
USART3
/dev/ttyS1
UART4
/dev/ttyS2
USART6
/dev/ttyS3
UART7
/dev/ttyS4
UART8
/dev/ttyS5
2.MATEK H743-WING映射
定义自定义wing.px4board文件:
CON ...
PX4\&RDKX5数据传输
PX4&RDKX5数据传输一、背景随着无人机技术的快速发展,其在物流、农业、巡检、搜救等领域的应用日益广泛。然而,为了实现更加智能和高效的飞行控制,无人机需要具备强大的数据处理能力和实时决策能力。传统的飞控系统(如PX4)虽然能够高效地完成基本的飞行任务,但在面对复杂环境或需要高级算法支持的任务时,其计算资源和算法扩展性可能显得不足。
为了解决这一问题,将机载电脑与飞控主控通过串口通信进行协同工作成为一种有效的解决方案。具体而言,飞控主控(如运行PX4固件的Pixhawk系列控制器)负责实时采集传感器数据(如IMU惯性测量单元、气压计、GPS等),并通过串口将这些数据传输到机载电脑。机载电脑则利用其更强的计算能力,对数据进行处理和分析,例如通过强化学习算法优化飞行策略、生成控制信号,或者进行扰动分析以提高系统的鲁棒性。最后,机载电脑将处理后的结果传回飞控主控,由主控执行具体的控制指令。
这种架构的优势在于:
分工明确:飞控主控专注于实时性和稳定性要求高的任务,而机载电脑则负责复杂的计算和算法优化。
灵活性高:机载电脑可以根据需求加载不同的算法模块(如 ...
H743发送串口程序
H743发送串口程序首先pixhawk 4上面有四个串口,一个给了GPS,一个是TELEM1 一个是TELEM2 ,根据PX4用户指南,一般TELEM1插wifi数传,TELEM2插板载计算机。
插wifi数传和插板载计算机所用的串口实际都是传mavlink消息,所以telem1口和telem2口都是设置的MAV参数
添加串口传感器,比如tfmini这种串口的传感器,就只剩下UART&I2C B(飞控板上打印的是这个)这个串口了,也叫TELEM4
查看H743板上串口说明:
与GPS连线:+5V,GND,R2,T2与罗盘连线:SCL CL1,SDA DA1与数传连线:+5V,GND,RX6,TX6禁用串口1(USART1)
通过QGC验证串口的有效发送PC(ttyS3)
打印Hello,UART!
RDX X5发送串口程序通过USBA进行串口转接
运行 python3 /app/40pin_samples/test_serial.py
从打印的串口设备(其中 /dev/ttyS0 是系统调试口,不建议对它进行测试,除非你完全明白它的作用)中选择总线号 ...
无人水空两用飞行器水中出水特性预测方法研究
无人水空两用飞行器水中出水特性预测方法研究论文分析与创新点这篇论文《无人水空两用飞行器水中出水特性预测方法研究》主要探讨了无人水空两用飞行器(UAUV)的水中出水过程,并提出了一种高效的预测方法。以下是论文的主要创新点和工作内容:
引入接力计算方法:论文提出了一种接力计算方法(RCM),用于模拟UAUV的出水和飞行过程。该方法结合了计算流体动力学(CFD)和动态模型,实现了从水-空气界面跨越到空气飞行的全过程模拟。这一方法解决了传统预测方法效率低的问题,能够在较短时间内完成复杂环境下的准确预测。
捕获并描述附着水状态:首次引入了捕获UAUV附着水状态的方法,利用非线性自回归模型(NARX)描述附着水状态的变化。这一创新解决了现有数学模型和实验方法难以捕获附着水状态特征的问题,为进一步研究附着水对飞行器的影响提供了基础。
高效气动系数识别方法:论文采用高斯过程回归模型(GPR)对气动系数进行了高效识别。通过CFD计算生成的数据集,建立了运动参数与气动力系数之间的关系,实现了无需详细研究气动模型结构就能准确描述复杂非线性关系的目标。
验证与实验结合:通过实验池测试和CFD模拟结果进 ...

ardupilot开发
ardupilot开发固件选择ArduPilot是一个开源、无人驾驶的硬件和软件平台,广泛应用于多旋翼飞行器、固定翼飞机、陆地车辆和水面船只等。SpeedyBeeF405WING是一个特定型号的飞行控制器,它支持ArduPilot固件。
ardupilot: SpeedyBeeF405WING-antennatracker:==这是一个用于无线电天线跟踪的固件。==
ardupilot: SpeedyBeeF405WING-bootloader:==这是引导加载器,用于初始化硬件并加载主固件==。
ardupilot: SpeedyBeeF405WING-copter:==这是一个多旋翼飞行器的固件==。
ardupilot: SpeedyBeeF405WING-heli:==这是一个用于直升机的固件==。
ardupilot: SpeedyBeeF405WING-plane:==这是一个用于固定翼飞机的固 ...

Mission Planner使用
Mission Planner使用界面:
端口连接,使用数据线为115200波特率;使用数传时为57600波特率。
初始设置:
安装固件;需要断开连接下加载。
遥控器校准设置:
电调断电,移动遥控器所有拨杆,注意右摇杆,上拉减小,下拉增大;其他正常,如左油门通道,上拉增大,下拉减小,右拉增大,左拉减小。
检查第五通道对应遥控器哪个开关,第五通道一般对应飞行模式的切换。
校准完成后,油门摇杆处于最低位,其他摇杆处于中位。
电调校准设置:
更换了遥控器,在校准遥控器后;更换了电调;更换了新飞控, 或者飞控参数还原后需要对电调油门进行校准。
电调校准步骤是以常用的BLHELI_S电调为例,其它品牌的电调差别不大,校准失败。把油门杆拉到最低,接上电源,正常开机后再拔掉电源,从步骤1重新开始:
拆掉螺旋桨;
无人机不要接电池, 飞控不要接USB,打开遥控器开关,把油门摇杆推到最高;
无人机接上电池, 等待系统初始化、飞控上的灯会出现红、绿、蓝三色交替 闪烁循环模式。油门杆保持最高位置不要动;
拔掉无人机电池, 此时油门杆还是保持最高位置不要动;
再接上无人机电池 (继续出现红绿蓝交替 ...
无人水翼航行器运动的非线性建模
无人水翼航行器运动的非线性建模无人水翼航行器的结构和运动特点为了提高航行器快速性,应尽量提高推进器的推力和减小航行器航行的阻力。从 节能的角度考虑,减少航行器航行时的阻力是提高快速性的好办法。航行器阻力包括水阻力和空气阻力。由于空气阻力比航行器水阻力小得多,因此主要考虑航行器的水阻力,其中包括摩擦阻力、涡流阻力(形状阻力)和兴波阻力三个部分。涡流阻力和兴波阻力可以通过改善航行器的线型而得以改进。
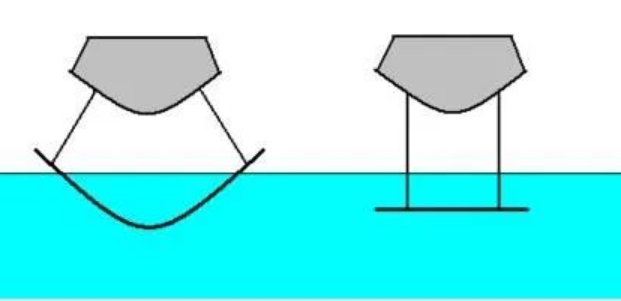
水翼附着了一个可以通过控制系统调节的襟翼。在不同航速和海面状况的条 件下,通过调整襟翼可以实现对升力的控制。通过对水翼实施控制,从而产生与波浪干扰力相反的力,以抵消或减轻波浪的干扰所引起的水翼船垂荡和纵摇运动, 保证水翼船在风浪中平稳地航行。虽然各种水翼船实际控制系统的具体构成各有不同,但是大都具有与下图相类似的结构原理。
无人水翼航行器的非线性运动数学模型高速水翼航行器的实际运动异常复杂,在一般情况下具有6个自由度,其中三个线性运动和三个转动运动 ,分别为:横荡 、 纵荡 、 垂荡和横摇 、纵摇 、艏 摇 。其中横荡 、纵荡 、垂荡分别为沿X,Y,Z轴的平直运动 ,横摇 、纵摇和艏摇分别为 ...

